哈佛科学家3D打印出一群可自我驱动的软性机器鱼
未知大陆发表于 2021-01-26浏览量:评论数:
哈佛大学的研究人员3D打印了一群柔软的机器鱼,这些鱼无需Wi-Fi或GPS就能以复杂的模式游泳。
受独特的居住在礁石中的刺尾鱼的启发,该团队的“ Bluebots”配备了四个用于精确导航的鳍片,以及一个LED和摄像头系统,可使其成群结队而不会发生碰撞。微型机器人的自给自足功能使其非常适合生态监控应用,而这些应用在人类无法接触的地方。
“只要观察他们在照片中的距离,他们就可以知道机器人在现实世界的远近”,该研究的主要作者弗洛里安·柏林格(Florian Berlinger)告诉《连线》杂志。
他补充说:“机器人通常部署在人类无法接近或危险的区域。” “在这种情况下,拥有一个自给自足的高度自治的机器人群体确实会让你受益。”
海底的灵感
在动物世界里,从蚁群到鸟群,到处都是群聚成自组织集体的生物,但鱼群尤其擅长这一点。这样的海洋生物军团使它们的组成鱼类能够根据邻居的感知来导航,并最终觅食、迁徙和躲避捕食者。
最近,许多研究人员尝试绘制和模仿这种自然的集体智慧,但是他们的群居机器人通常是远程控制或GPS引导的,而不是自组织的。同样,其他项目也设想了水下机器人技术来监视诸如珊瑚礁之类的敏感区域,但事实又证明,这些机器人很难协调。
在水生条件下,传统的无线电或GPS通信已被证明是无效的,因此有必要开发一种新颖的同步方法。受到真正鱼群的启发,这些鱼群仅使用隐性视觉线索来指导它们,因此,哈佛大学的科学家着手开发一种不需要任何外部控制的新型导航系统。
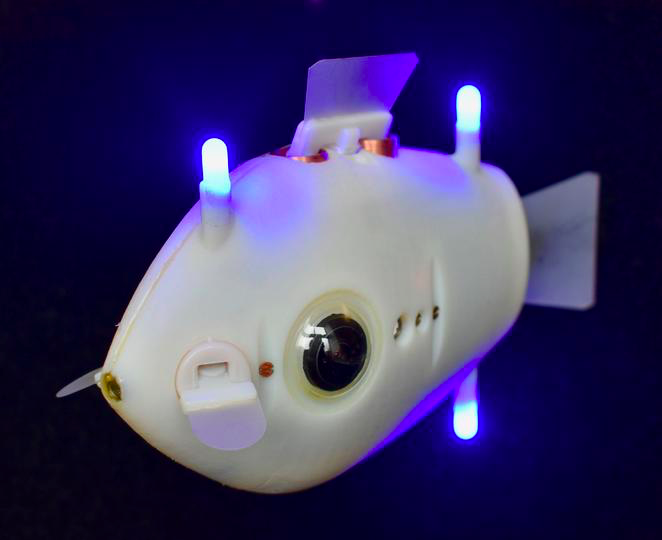
科学家以鱼类为灵感的机器人配备了相机和蓝色LED,可帮助他们在水下航行
成群游动的软机器鱼
哈佛团队针对这种协调难题的答案是3D打印七个被称为“ Bluebots”的、受鱼类启发的自主微型软机器人。每个微型机器人的尺寸仅为235 cm3,具有一套传感器和致动器,使他们能够感知在所有三个空间维度内移动。
为了向Bluebots提供3D视觉,科学家还为它们安装了两个195°广角镜头和一对垂直堆叠的蓝光LED。从本质上讲,摄像头就像机器人的“眼睛”一样,并且使用基于视觉的算法,它们能够快速识别邻居的位置并改变航向。
在测试期间,Bluebots被编程为以标称时间间隔定期闪烁。这样一来,他们就可以自发地聚集成一团,而这种运动从外面出现。在以后的实验中,然后以不同的时间间隔设置漫游器,使它们可以从分散状态重复转换为聚集状态。
作为最终测试,科学家利用隐式协调算法实现了类似于“碾磨”的形成,这种碾磨是真实鱼类用来避开捕食者的漩涡状运动。 Bluebots最终能够实现这种现象的最小化版本,以顺时针或逆时针动态旋转。
展望未来,科学家们相信,摄像头和驱动技术的进步将推动新的、更复杂的水下机器人的发展。目前,该团队的协调技术可用于在集体搜索和救援任务等领域指导无人驾驶车辆。
